|
|
|
|
|
29/03/01 The web page has gone online. I'm pretty pleased with myself after making the page in one day. There is not a lot going on with Supernova at the moment. I'm still waiting to go to Gloucestershire to collect the aluminium from AVON metals. I should be going next Tuesday, It's going to be a long drive from south London! The name of the robot was actually suggested by Steven at Avon metals (Avon backwards = Nova). The metal will be used mainly to make the Chassis for the robot. Hopefully I will be using Dural, or even a 7000series alloy aluminium. It depends what Avon metals have available.
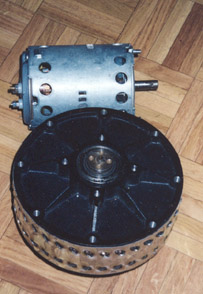
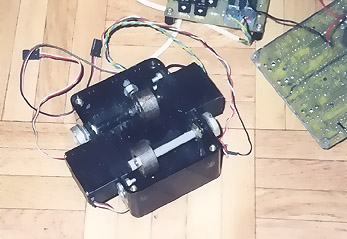
30/03/01 I have my own domain as well at last www.team-supernova.co.uk not bad for a tenner! I've been doing some calculations for the energy produced by the disc, there are enormous! We will be using a smaller disc than Hypno-disc (700mm), ours will be about 467mm in diameter. The actual outside ring is a 16mm steel section from a oil rig member! Thanks again to the guys at UCL for letting me use it. The energy increases dramatically with angular velocity. Unlike other teams using a motor to drive their disc, we will be gearing the disc up from the motor. The motor produces 2000rpm, hopefully we can run the disc at about 4000rpm! Possibly higher, depending on the acceleration time. Here's a picture of the bearings that will be used with the disc, 40mm bore I think that will hold it! there's also a picture of my new jig saw, at should be able to cut 10mm steel so the 6mm ally for the chassis should not be too much of a problem.
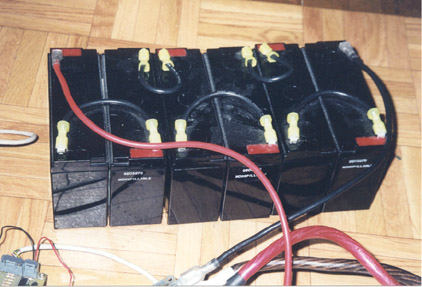
3/04/01 Went to UCL today to speak to the technicians today about the design for the improved disc. They will be making it soon.... Looks like I will have to go to Gloucester on Friday as I'm busy with work at the mo. I have calculated the Ke of the disc. At 2200rpm the disc will have 20Kj and an acceleration time of 2.5sec! I can't wait to see the kind of damage the disc does, obviously I will be hiding behind a brick wall a very long distance away! The stall torque has been calculated to be 20Nm+, this accounts for the fast acceleration time. This was calculated by extrapolating the power/current curve supplied by the manufacturer. At that torque the motor will be pulling a lot of current, I think some larger batteries are in order. If you are wondering why there are no pics on this page, I'm waiting to fill a film roll so I can develop it. There will be some interesting size comparisons between the Lynch and a Bosch 750w!
7/04/01 I've pretty much got the wheels sorted out, I will be using some 265mm dia wheels from RS. They are the same wheels used by Pussycat, I was impressed by the fact that they survived so well against Hypno and Chaos's flips. They are also fairly cheap at £10 a go. I will be buying spares as PC used three sets in Robotwars. They also have a 1in bore which allows me to put in some glacier DU bearings (sintered bronze with PTFE) and still have space for a 22mm dia shaft.
The wheels will have some 3mm sheet ally as armour for the plastic hub. I've found this excellent article by the maker of Biohazard , It sums up perfectly why I had problems with Oblivion last year. It's worth a read : Article
24/05/01 Sorry for the lack of updates, i've been busy with exams and stuff. This update is going to be a long one. I can finally start on the robot now (as i have a 4 month holiday!). I have taken some pictures of the Lynch being tested
Starting from the top left, Picture 1: you can see the set up i used to run the Lynch. I used a 4QD 120A speed controller at 36v with a mixer board Picture 2: A picture of the Lynch in its full glory. The shaft has been converted into a plate with 4 6mm tapped holes to bolt a sprocket to. The motor as 4 M8 holes to attach it to the chassis. Picture 3: here you can see the brush assembly. Richard at Lynch gave us some spare brushes and brush assembly. Picture 4: A picture of three of the six 12v 12Ah batteries donated by Panasonic. I did intend to use then to power the robot but decided that the connection tabs looked too weedy to handle the current. They also have a low max discharge. Picture 5: The servo/Pot setup i used as the interface between the the RC gear and speed controllers.
27/05/01 Just got the latest Robotwars magazine, and there's a picture of us with Onlivion2!
It actually looked quite good before the house robots got their claws into it. I'm the guy in the middle of that pic. Still don't know why the thing stopped, i tested the robot on the bench after the fight and everything was ok!
I've also added a costings page here. It shows how much i've spent over the three years of making robots.
15/06/01 (Pictures to follow) I got the disc from uni yesterday, it came in at 30Kg. It was excellently machined and is going to scare a few people. I will be attaching some BO1 tool steel as blades. They are 10mm thick and protrude by 50mm from the disc. The steel comes in an annealed form to make machining easier. I may case harden them to make the edges harder whilst keeping the centre tough. I'm not sure to what extent the hardening will work as the steel already has a relatively high Carbon content. The chassis has been completed, It is essentially made from 5mm dural that has ally angle joining the sheets to create the shape. All the edges will be TIG welded to make a more rigid structure. I did some tests on the front where the discs sits. I'm worried that its too flexible. I may have to weld some ally box section to the sides to increase rigidity. I finally found a company that could supply small lengths of Ally (6082 T6) for the beams that hold the disc. Most companies I asked either did not stock the size (3" x 0.75" x 360mm) or wanted to sell me 4m of the stuff! Ended up paying £42 for two of these sections from Metalfast (this is getting to be a very expensive hobby!). On the Events front, the robot should be completed by the end on this month so I will be able to attend an event called Wilsons day to show off the robot. The robot will be running but I think it will be a bad idea firing up the disc. Supernova will be also be entering a robotwars event in the London Arena early August. I feel sorry for anyone we face, if it does not break done (serious possibility with my electronic skills!) they are going to need a binbag to collect pieces of their robot.
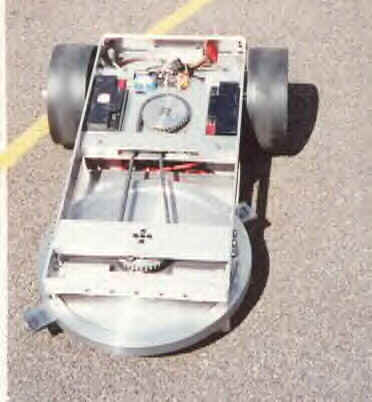
17/07/01 Not much has happened since last time. It's always the small things that take ages to finish! I can announce two new sponsors though. Albright have agreed to donate a 300A relay to the project. I collected it last friday from Surbiton. It came in a huge box, this worried me as there was not much space in the robot to fit in a large relay. In the end there was a lot of wrapping around the relay. It weighs in at 1Kg and should be more than up to the job. My second sponsor is Hawker energy who have agreed to donate 6 hawker 16Ah genesis batteries to the project. They are ideal for the project due to their low internal resistance. This allows them to be charged very quickly and they can deliver up to 3 times more current then similar SLA batteries. The Yuasa 17Ah batteries that i had been using were 4 years old and were showing their age. The new Hawker batteries are worth £65 pounds each. There is no way i could afford that, so thank you Hawker. Here's a picture of supernova when it was on display at Wilsons school Sutton. The two black boxes are the Yuasa batteries. The disc has a diameter of 450mm. I will be adding armour around the wheels but otherwise this is the robot that will compete in the auditions. I did take the robot to another event (robots@war Arena) where I was able to drive Supernova around. It did suffer from interference but I believe this was due to a damaged Aerial. The robot was surprisingly controllable considering there was so much weight on the front wheels. What happens is that the front stays still whilst the back of the robot turns in a arc. I found it to be very nimble and was able to easily push around the the sleepers that enclosed the arena. I was also surprised how reliable the robot was, I had no electrical faults (apart from the aerial) and apart from a bolt coming loose in the drive train the mechanics were sound.
6/10/01 I clearly have not this regular updating sorted. My last update was 3 months ago! Well a lot has happened since then, we have been to the qualifiers, qualified and competed in series 5! I'll start the story the day before the qualifiers: We still had quite a bit to do to the robot like decorate it, make a lid, mount the cage around the back wheels. As usual I had left things a bit late. Well by 6Pm we had most of that sorted. I turned the robot on again and found that the left motor always accelerated/decelerated a lot slower then the other motor. I guessed that there was a problem with a speed controller. I knew if there was a problem I would not be able to fix it in time as I only had a few hours left. then i realized that the fault could be in the bosch drive motor , I knew that I was clutching at straws as the motors had proven to be very reliable in the past. I connected the controller to the right motor and tried again. Everything worked! So it was a fault in the left motor. I grabbed my brother and we started to take the whole robot apart as the motors were the first to go in and so would be the last to be taken out (yeah i know, bad design). I must have undone some 200M6 bolts with Nyloc nuts. I took the motor apart and found that the brush's were barely touching the commutator. The copper braid that connected the brush to the main power cables to the motor had become snagged in the motor casing. I fixed the problem and put the motor together, and tested it...It worked! It was about 9Pm now, why did I get the feeling that it was going to be a long night! My midnight most of the robot was back together again. All I had to do was to put the disc drive motor back in again, but there was a problem. I had forgotten how i wired the damn thing up. I then spent the next hour connecting cables up in different combinations. I must have got to bed at about 2 in the night.. The next day either was going to go very well or very badly. I got up at 6AM, as we had to be Elstree studios at 11. Every thing worked so the robot was packed into my dads car and we left for the auditions. When we got there we noticed the lack of robots qualifying. We had our photo taken then got the robot onto the bench. We were on a bench next to a robot called "Fire and Ice". I had forgotten to take a camera in the rush. It was a 2 Wheeled robot that looked like a parallogram from the side. It was made from 3mm thick 1" square tube with 3mm polycarbonate panels as Armour. We had the usual safety check which the robot passed. We then found out that we would be fighting "Fire and Ice". I had never seen it moving so I did not know how the fight would go. They had flipping wedges on their front and back that were pneumatically operated But Supernova could run upside down. I then realized that i had never driven it up side down and so did not know if i would have interference problems! more soon.......
|